PERANCANGAN DAN PEMBUATAN TIMBANGAN
OTOMATIS BERBASIS MIKROKONTROLLER AT89S51
Meky Nurcahyono,Arief Budijanto
Jurusan Teknik Elektro
Fakultas Teknologi Industri
Institut Teknologi Adhi Tama Surabaya
1. Pendahuluan
Alat timbang dalam proses produksi adalah
salah satu dari instrumen penunjang yang jamak digunakan.Meskipun bukan alat
yang memegang peranan vital tetapi mutlak diperlukan dikarenakan tiap form
laporan hasil produksi pasti mencantumkan berat barang hasil produksi.
Timbangan otomatis dengan konveyor ini cocok digunakan untuk industri yang memproduksi kertas setengah jadi yang
menggunakan alat timbang manual untuk mengetahui berat kertas dalam bentuk
glondongan yang diproduksi , dimana sebelum masuk ke tempat timbangan tersebut
terdapat banyak conveyor dan lengan pneumatic yang digunakan untuk meletakkan
glondongan kertas ke tempat timbangan ,lagipula harus ada operator didepan timbangan yang bertugas memonitor hasil timbangan dan
mencatatnya ke form produksi barang.Hal tersebut sungguh sangat tidak efisien
baik dari segi jarak,waktu dan tenaga kerja.
Berdasar permasalahan tersebut diatas, maka
diangkat untuk dijadikan sebagai usulan judul tugas akhir .Sistem ini menjadi salah satu solusi untuk lebih
meminimalkan peran manusia dan mengoptimalkan peran teknologi otomasi dan
mekanik sehingga membantu kerja dari manusia yang pada ujungnya meningkatkan
kinerja dan proses produksi
2 Landasan Teori
2.1 Timbangan Berat
Parameter
yang sering digunakan dalam proses produksi salah satunya adalah berat.Dan
berat termasuk dalam parameter kritis.Parameter kritis adalah parameter yang
selalu bergerak dinamis.Oleh karena itu parameter seperti ini perlu diamati
terus menerus agar kinerjanya sesuai dengan kondisi operasi yang telah
ditetapkan.
Pengamatan berat dapat dilakukan
melalui alat timbang manual.alat timbang manual yaitu alat timbang yang
penunjukannya masih memakai jarum ,sehingga diperlukan kecermatan dalam
memasukkan data hasil timbangan.karena
tingkat ketelitian tiap orang berbeda-beda maka hasil timbangan menjadi kurang
akurat.
Ada pula pengamatan berat menggunakan sebuah perekam yang menggunakan
pena sebagai penggambar grafik parameter pada kertas.Namun cara demikian tidak
efisien karena nantinya akan dihasilkan banyak tumpukan kertas untuk jangka
waktu penyimpanan yang lama sehingga sukar dalam pembacaan di masa mendatang
Sedangkan untuk
hasil yang lebih akurat digunakan timbangan elektrik yang mana sudah
menggunakan sensor berat (Load Cell) sebagai penginput data,sehingga tampilan
data lebih akurat
2.2 Konveyor
Konveyor memegang
peranan peranan penting ,baik dalam proses pra maupun pasca produksi.Ada
beberapa jenis konveyor yang umum digunakan dalam proses produksi.Diantaranya
Chain Konveyor,Feeder,dan Belt Konveyor.
2.2.1Chain Conveyor
Adalah jenis konveyor yang bidang
bebannya terbuat dari rangkaian plat baja yang disusun sedemikian rupa
mengikuti alur rantai gigiyang digerakkan oleh gearbox . Jenis konveyor ini
banyak digunakan untuk aplikasi paska produksi ,seperti misal pada proses pemindahan
barang hasil produksi menuju ke gudang
penyimpanan.Salah
satu jenis dari Chain Conveyor dapat kita lihat dalam aplikasielevator yang
terdapat di pusat perbelanjaan.
2.2.2 Feeder
Feeder adalah jenis konveyor yang berfungsi sebagai pemberi umpan pada
proses produksi.Jadi feeder berfungsi sebagai pengatur material dasar dari
proses produksi.Feeder terutama banyak digunakan dalam produksi semen,kertas
,finish mill.
2.2.3 Belt Conveyor
Adalah jenis konveyor yang bidang bebannya terbuat dari karet.Biasa terkenal
dengan nama Rubber Belt .Konveyor
jenis ini biasa digunakan untuk membawa material seperti kertas ,batubara
,tepung dll..Dari segi harga relatif lebih murah dari pada kedua jenis konveyor
diatas .dan lagipula relatif lebih mudah dalam pembuatan konstruksinya.Oleh
sebab itu Jenis konveyor ini digunakan sebagai aplikasi dalam tugas akhir
ini,meskipun untuk aplikasi nyata ,penggunaan Chain Conveyor disarankan untuk
hasil lebih baik
2.3 Mikrontroller 89S51
Mikrokontroler keluaran ATMEL dapat dikatan sebagai
mikrokontroler terlaris dan termurah. Chip controler ini dapat diprogram
menggunakan port paralel atau serial. Selian itu, dapat beroperasi hanya dengan
satu chip dan beberapa komponen dasar seperti kristal, resistor, dan kapasitor.
AT89s51 merupakan produk dari ATMEL dengan beberapa fitur yang dimiliki antara
lain:
- Kompatibel dengan MCS-51
- 4Kbyte memory program yang dapat ditulis hingga 1000 kali.
- kecepatan clok 0-33MHZ
- Memory data 128 Byte RAM internal.
- 32 jalur input-output (4 buah port parallel I/O)
- 2 timer/ Counter 16 bit
- 2 data pointer
- 6 Interrupt (2 timer, 2 counter, 1 serial, 1 reset)
- ISP (In System Programmable) Flash Memory
3.
Perancangan Sistem
3.1
Konsep Perancangan Sistem
Pada prinsipnya timbangan dengan konveyor
otomatis dapat dianggap sebagai suatu timbangan elektris mekanis berbentuk
konveyor yang secara otomatis menentukan berat material yang lewat
diatasnya.Sistem ini juga dapat disebut perkawinan dari konveyor dan timbangan
dikarenakan kedua alat berada dalam satu konstruksi.
Sistem timbangan ini mengubah
bessaran analog (berat material) menjadi digital.dan mentransmisikan data
digital ke computer untuk dilakukan penampilan data sekaligus
menyimpannya.Keuntungan yang diperoleh adalah:
- Pencatatan secara terkomputerisasi
- Biaya lebih murah
Perangkat keras ini berbasis
mikrokontroller AT89S51 agar didapat system yang benar-benar minimal dan murah
.Mikrokontroller ini diprogram sedemikian rupa sehingga dapat melakukan tugas
konversi dengan bantuan ADC 0804 dari data analog ke data digital dengan
menggunakan sensor Flexiforce sebagai penginput data berat ke mikrokontroller
dan mengirimkan data digital ini melalui port komunikasi serial RS 232
.Disamping itu dibuat perangkat lunak di computer untuk dapat menerima data
digital ini melalui port serial dan menampilkan data serta menyimpan data
sekaligus.dibawah ini ditunjukkan blok diagram dari Timbangan otomatis dengan
konveyor;
3.2 Perangkat
Keras
Sistem alat yang dibuat terbagi dalam beberapa modul
rangkaian yang mempunyai tugas dan fungsi tersendiri, rangkaian-rangkaian
tersebut diantaranya adalah sebagai berikut:
3.2.1 Rangkaian Sumber Tegangan Utama
Untuk
memenuhi kebutuhan sumber tegangan Mikrokontroler, motor DC,sensor digunakam
sumber tegangan dengan inputan 220 Vac untuk sumber tegangan primer dan
sekunder mengeluarkan tegangan 12 Vac dengan disearahkan oleh dua dioda karena
menggunakan out put trafo sekundar CT 12V atau system gelombang penuh/full wave
setelah disearahkan dicoupling dengan elektrolit capasitor dengan nilai 2200
Uf/50 V, untuk mendapatkan tegangan yang stabil digunakan IC 7805 untuk
mendapatkan tegangan yang konstan karena membutuhkan arus yang cukup besar
yaitu 5 A, out put dari keluaran transistor di coupling dengan elektrolit
capasitor keramik 100 nF/50 V untuk menghilangkan arus bolak-balik yang masih
tersisa tegangan yang akan dihasilkan 5
Vdc dengan arus 5 A dc
.

Gambar 3.2 .1Rangkaian Sumber Tegangan Utama
3.2.2. Kontroller
Mikrokontroler merupakan otak yang mengatur dan mengolah
semua proses kegiatan yang dilakukan agar system yang dirancang dapat berfungsi
sebagaimana mestinya. Dalam system ini digunakan mikrokontroler AT89S51,
mikrokontroler ini dipilih karena mikrokontroler ini merupakan mikrokontroler
yang tepat guna yaitu memiliki fasilitas yang cukup banyak, harga ekonomis,
teknik pemrograman yang mudah, perangkat pendukung yang mudah diperoleh serta
AT89S51 memiliki kemampuan dan fasilitas yang lengkap untuk aplikasi sederhana dan
umum. Namun tidak menutup kemungkinan AT89S51 digunakan untuk aplikasi yang
lebih rumit asalkan system yang digunakan memiliki komponen pendukung yang
lengkap.
3.2.2.1 Rangkaian Clock
Peran clock bagi mikrokontroller
ibarat jantung bagi manusia. Manusia tanpa detak jantung tidak akan hidup.
Mikrokontroler tanpa detak clock juga tidak akan berfungsi. Pulsa clock
mengambil peranan penting dalam menentukan
kecepatan dan sinkronisasi kerja central prossesing unit (CPU)
mikrokontroler. Seluruh keluarga MCS-51 mempunyai oscillator dalam chipnya,
disebut on chip oscillator, yang dapat digunakan sebagai sumber clock bagi CPU.
Untuk menggunakan rangkaian oscillator yang ada dalam chip tersebut maka CPU
perlu dihubungkan dengan sebuah kristal oscilator eksternal melalui pin XTALI
dan XTAL2 dari 89s51 serta dua buah kapasitor ke ground, dengan memanfaatkan
on-chip oscilator rangkaian pembangkit pulsa hanya membutuhkan dua buah
kapasitor dan sebuah quartz crystal, nilai kapasitor yang yang sering digunakan
adalah 30pF. Jika frekuensi kristal yang
di gunakan adalah 12 Mhz, maka kristal tersebut akan mengeluarkan
12.000.000 pulsa perdetik. Dalam hal ini
berarti dalam 1 detik akan ada 1.000.000 (12.000.000/12) machine cycle.
rangkaian Oscillator Clock di tunjukkan pada gambar 3.3

Gambar 3.2.2.1
Rangkaian Oscillator Clock
3.2.2.2. Rangkaian Reset.
Rangkaian reset digunakan untuk mereset mikrokontroler
89s51 agar alamat kerja (program) dari mikrokontroler di mulai dari alamat
0000H . Keadaan reset diperoleh bila pin RST dari 89s51 diberi logika ‘1‘ dalam 2 cycle setelah catu daya
diberikan, reset bisa dilakukan secara otomatis setelah power dihidupkan (auto power on reset ), Maupun secara
manual dengan bantuan saklar . Konfigurasi dari rangkaian reset ditunjukkan pada
gambar 3.4, untuk siklus mesin sama dengan 12 periode osilator, maka nilai
kapasitor reset adalah :
= 2 X ( 12 X T )
= 2 X ( 12 X  )
)
=
2 X ( 12 X  )
)
= 2  s
s
Q = V X t (3-2)
=
5 X 2.10
= 10 µs

Gambar 3.2.2.2 Rangkaian Reset
Gambar
3.4 merupakan gambar rangkain reset yang bekerja secara manual maupun otmatis
saat sumber daya diaktifkan. Pada saat sumber daya diaktifkan, maka
kapasitor C2 sesuai dengan sifat
kapasitor akan terhubung singkat pada saat itu sehingga arus mengalir dari VCC
langsung kekaki reset sehingga kaki tersebut berlogika 1. Kemudian kapasitor
terisi hingga tegangan pada kapsitor (Vc) yaitu tegangan antara VCC dan titik
antara kapasitor C2 dan resistor R6 mencapai VCC, tomatis tegangan pada R6 atau
tegangan RST akan turun menjadi 0 sehingga proses reset selesai. Jika saklar
ditekan reset bekerja secara manual, aliran arus akan mengalir dari VCC melalui
R7 sebagai pembatas arus menuju kekaki RST. Tegangan pada VR2 akan berubah
menjadi:
Dengan nilai Vcc sebesar 5 volt maka didapat tegangan
pada R2 sebesar 4,94 volt. Tegangan 4,94 volt pada kaki RST menyebabkan kaki
ini berlogika 1 pada saat saklar tersebut ditentukan. Pada saat saklar dilepas
aliran arus dari Vcc melalui R7 akan berhenti dan tegangan pada kaki RST akan
turun menuju ke nol sehingga logika pada kaki ini berubah menjadi 0 dan proses
reset selesai.
Dengan asumsi ferekuensi kristal
yang digunakan adalah sebesar 12Mhz, maka pin RST harus bernilai high selama 2
mikrodetik.
3.2.2.3 Rangkaian Driver Motor
Rangkaian
ini terdiri dari dua transistor tipe NPN dan PNP, dioda dan dua resistor
seperti terlihat pada gambar dibawah. Disini transistor sebagai switch dimana resistor dibias menjadi
saturasi atau cut off. Dioda pada
rangkaian ini digunakan untuk melindungi transistor dari arus balik. Untuk
menyambung dan memutuskan rangkaian eksternal
seperti ON/OFF, sebagai pembantu dari relay diperlukan suatu transistor yang
berfungsi sebagai switch. Transistor
berfungsi juga sebagai penguat arus yang diperlukan bagi relay agar dapat
dikontrol secara otomatis melalui AT89S51. Untuk menghidupkan relay dibutuhkan
arus yang cukup besar. Dengan batas arus colektor sekitar 500mA, arus ini digunakan untuk mendriver relay. Transistor
yang digunakan adalah C9012 dan C9013 yaitu tipe NPN dan PNP. Karena
Mikrokontroler mengeluarkan logika low maka arus Ib1 akan mengalir sehingga
menarik arus Ie yang akan menuju Ib2 karena R2 lebih besar dari pada R1 maka
arus yang besar akan mentrigger basis
pada TR2 mengakibatkan arus yang besar dari tegangan 12V akan mengalir menuju
ground, hal inilah yang menyebabkan relay akan bekerja.

Gambar 3.2.2.3 Rangkaian Driver Motor
3.2.4Rangkaian
Sensor Perintah Timbang
Sensor yang digunakan adalah sensor Photo Dioda. Photodioda adalah salah satu alat yang dibuat untuk berfungsi paling baik
berdasarkan kepekaan terhadap cahaya. Pada dioda ini, sebuah jendela
memungkinkan cahaya untuk masuk melalui pembungkus dan mengenai persambungan.
Cahaya yang datang menghasilkan elektron bebas dan lubang.makin kuat cahayanya,
makin banyak jumlah pembawa minoritas dan semakin besar arus baliknya.
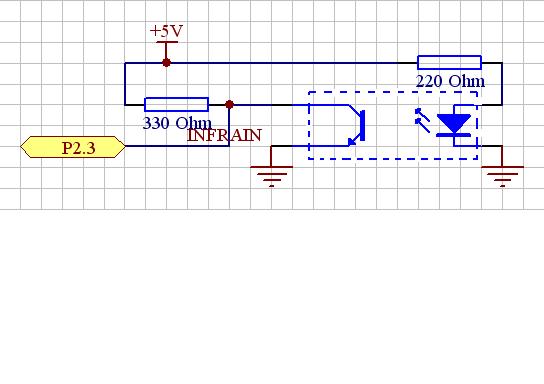
Ketika sensor diaktifkan, infra red akan memancarkan cahaya selaku emitter
dan cahaya ini akan diterima oleh photo dioda. Sebagai akibat dari penerimaan
cahaya pada photo dioda, maka hambatannya akan berkurang sesuai dengan
intensitas cahaya yang diterima. Dengan berkurangnya hambatan pada photo dioda,
mengakibatkan turunnya tegangan pada photo dioda, sehingga tegangan input
rendah dari pada input tegangan referensi pada input negatif.Namun ketika
cahaya dari emitter atau infra red dihalangi oleh benda atau target, maka
hambatan photo dioda menjadi bertambah, dan hal ini mengakibatkan kenaikan
tegangan pada photo dioda, sehingga tegangan input positif melebihi tegangan
referensi. Dengan keadaan ini, maka keluaran Op-Amp menjadi negatif, sehingga
dapat memberikan bias yang kemudian menonaktifkan indicator berarti memberikan
inputan pada mikrokontroler pada Port 2.3. Dengan mengatur VR 100k kepekaan cahaya dapat
diatur.
3.2.5
Rangkaian Sensor Timbangan
Sensor
yang digunakan untuk pengukuran timbangan adalah sensor Flexiforce.Dimana nilai
konduktansi sensor Flexiforce (1/R)dari Sensor Flexiforce linier terhadap gaya
tekan atau beban yang diberikan .
Oleh karena itu,
dalam aplikasi ini akan dibaca nilai konduktansi tersebut dengan menggunakan
rangkaian Non Inverting Amplifier Sehingga didapatkan hasil pembacaan
nilai beban yang linier.Rangkaian Non Inverting Amplifier tersebutterdapat
dalam blok Rangkaian Pengkondisi Sinyal.Keluaran dari rangkaian pengkondisi
sinyal sudah berupa tegangan DC 0-5V dan diumpankan ke masukan ADC.Kemudian
data digital dari keluaran ADC ini dibaca oleh mikrokontroller untuk
ditampilkan pada layar komputer
Skema rangkaian
pengkondisi sinyal untuk sensor Flexiforce asalah sebagai berikut:

Gambar 3.7.
Rangkaian Pengkondisi Sinyal dan Sensor Flexiforce
3.2 Perancangan ADC 0804
(Analog to Digital Converter)
Dalam pembuatan alat ini juga
dibutuhkan pengubah sinyal analog menjadi sinyal digital / disebut juga “Analog To Digital Converter” (
ADC ), hal ini disebabkan karena inputan yang didapat dari rangkaian
pengkondisi sinyal untuk sensor
Flexiforce masih berupa sinyal analog sedangkan rangkaian kontroller menggunakan sistem digital
sehingga membutuhkan masukan berupa sinyal digital.Untuk rangkaian pengkonversi
data analog ke digital (ADC) digunakan IC 0804 . Dengan sebuah masukan yaitu
Vin+ (pin6) dan delapan buah keluaran yaitu DB0-DB7 (pin 11-pin 19) pada port1.
Bekerja dengan tegangan referensi sebesar 2,5 Volt pada Vref/2 atau pin 9 yaitu
didapat dari resistor pembagi tegangan (sesuai dengan data sheet). Fungsi dari
rangkaian referensi ini adalah untuk mendapatkan resolusi satu bit yang di
inginkan.
ADC ini memiliki range antara 0 sampai 255 dengan menggunakan
pencatu daya +5 Volt. ADC 0804 telah dilengkapi dengan internal clock yang di
pasang secara running dan dapat diaktifkan dengan menghubungkan komponen
resistor eksternal ( R ) dan komponen kapasitor eksternal ( C ) pada clock R
dan clock IN untuk menghasilkan sinyal clock. Nilai R di tentukan sebesar 1 KW dan
nilai C sebesar 220 nF, sehingga memberikan frekuensi clock sebesar :
Fclk
= 4,13 KHz
Dari perhitungan di atas dapat dilihat bahwa harga frekuensi
yang di dapatkan sudah memenuhi harga yang di minta ACD 0804 berdasarkan data
sheetnya.
ACD di rancang untuk dapat menerima tegangan masukan (Vin+)
0Volt sampai 5Volt sehingga satu bit berbobot :
Sedangkan
tegangan Frekuensi (Vref) sama dengan:
Sesuai dengan
data sheet, maka untuk perhitungan setiap satu 1 bit berbobot:
Resulusi 1 bit =  banyak data perbit 28 = 255
banyak data perbit 28 = 255
=  = 9,8 mV atau = 10 mV
= 9,8 mV atau = 10 mV

Gambar
3.8. Rangkaian ADC 0804
3.3 Perancangan Komunikasi Serial
Melakukan komunikasi serial
menggunakan mikrokontroler AT89S51 dapat dilakukan dengan memanfaatkan
fasilitas port serial yang sudah ada didalamnya. Port serial memungkinkan kita
untuk bisa mengirimkan data dalam format serial. Apabila hendak menghubungkan
mikrokontroler AT89S51 dengan PC (komputer pribadi)
Melalui
port serial, level TTL harus dirubah menjadi level RS-232. Untuk keperluan
ini dapat digunakan IC MAX232.
Hubungannya dapat dilihat seperti pada gambar 3-12.

Gambar 3.10
Rangkaian Serial dengan IC Max232
Pada standart
komunikasi serial sesuai dengan spesifikasi standart RS 232-C, level tegangan
yang digunakan adalah level tegangan yang berkisar antara –3 volt hingga –15
volt untuk kondisi logika ‘1’ atau yang disebut dengan keadaan mark dan antara +3 volt hingga +15 volt
untuk kondisi logika ‘0’ atau disebut dengan keadaan space atau dengan kata lain standart RS 232-C menggunakan logika
negatif terbalik
3.4 Perancangan Perangkat Lunak
Program yang dirancang untuk mengendalikan
proses kerja sistim ini terdiri dari atas beberapa sub program yang akan
menyusun susunan program yang terintegrasi. Eksekusi terhadap program utama
dilakukan setelah alat diaktifkan atau direset secara hardware. Pengaktifan
tombol reset menyebabkan program counter (PC) menuju alamat 0000H lokasi awal dari program.
Perangkat lunak yang
digunakan untuk AT89S51 ini adalah menggunkan bahasa Assembler keluaraga
MCS51.Program yang ditulis dengan bahasa Assembler terdiri dari Label;
Kode Mnemonic dan lain sebagainya, pada umumnya dinamakan sebagai
Program sumber (Source Code) yang belum bisa diterima oleh prosesor
untuk dijalankan sebagai program, tapi harus diterjemahkan dulu menjadi bahasa
mesin dalam bentuk kode biner.
Program sumber dibuat dengan Program editor biasa misalnya Note Pad
pada Windows, Selanjutnya Program sumber diterjemakan (Compile) ke
bahasa mesin dengan menggunakan Compiler MCS 51. Hasil kerja dari Extension
“Hex”,”Obj”,”Lst” dan “Bin”.
File yang berektensi “Bin” berisikan kode – kode bahasa mesin, kode–
kode bahasa mesin inilah yang diumpankan ke memori Program (ROM). Dalam dunia
Mikrokontroller biasanya file biner ini diisikan ke UV EPROM, dan khusus untuk
Mikrokontroller buatan ATMEL, Program ini diisikan kedalam Flash PEROM yang ada
didalam Chip AT 89S51.
Assembler Listing
merupakan naskah yang berasal dari program sumber dalam naskah tersebut pada
bagian sebelah kanan/ kiri setiap baris dari program Sumber diberi tambahan
hasil terjemahan program Assembler. Tambahan tersebut berupa nomor memori program
berikut dengan kode yang akan diisikan pada memori program bersangkutan. File
ini sangat berguna untuk dokumentasi dan Sarana untuk menelusuri program yang
ditulis apabila terjadi kesalahan.
Perlu diperhatikan
adalah setiap prosesor mempunyai konsentrasi yang berbeda, Instruksi untuk
mengendalikan masing – masing prosesor juga berlainan dengan demikian bahasa
Assembler untuk masing – masing prosesor juga berbeda, yang sama hanyalah pola
dasar cara penulisan program saja
Untuk proses transfer data dari Mikrokontroller ke PC
,ProsesPengolahan dan penyajian data hasil timbangan serta penyimpanan data
menggunakan bahasa program Borland Delphi 7.Penggunaan Delphi dimaksudkan
karena selain lebih mudah peggunaannya dan merupakan bahasa tingkat tinggi dan
terkompilasi yang mendukung bahasa terstruktur serta Perancangan Berorientasi
Object (OOD).
3.5 Pembuatan
Flowchart
Flowchart merupakan suatu bagan yang mengambarkan atau
mempresentasikan suatu algoritma atau prosedur untuk menyelesaikan masalah.
Didalam penyusunan program, untuk memudahkan didalam pembuatannya, maka perlu
untuk membuat flowchart sebagai acuan penyusunan program yang ada. Berikut flowchart untuk perangkat lunak
dari system konveyor timbang.
Untuk gambar flowchart tidak dapat saya uploadkan..!!
DAFTAR PUSTAKA
[1] Agfianto Eko Putra,2004. “Belejar Mikrokontroller AT89c51/52/55(Teori dan Aplikasi)” Gava
Media Yogyakarta.
[2] http://Info-sehat.com
[4] Institut Elektronika Indonesia, 2000. “Komparator dan aplikasinya”.
[5] Kristanto,2003. “Bahasa
Assembly”, Gava Media, Yogyakarta.
[6] Malik Ibnu, 2003. “Belajar
Mikrokontroller AT89s52”, Penerbit Gava Media, Jogjakarta.
[7] Malvino, 1985. “Aproksimasi
Rangkaian Semikonduktor”. Penerbit Erlangga, Jakarta.
[8] Malvino Barmawi,
1991. “Prisip-Prinsip Elektronika”. Penerbit Erlangga, Jakarta
[9] Moh. Ibnu Malik,2003. “Belajar
Mikrokontroler ATMEL AT89S8252”, Penerbit Gava Media Yogyakarta.
[10] Paulus Andi Nalwan, 2003. “Teknik Antarmuka dan Pemrograman
Mikrokontroller AT89c51” PT.Elek Media Komputindo,Jakarta.
[11] Paulus Andi Nalwan,2004.”Panduan Praktis Penggunaan dan Antarmuka Modul
LCD M1632” PT.Elek Media Komputindo, Jakarta.
[12] P C Sen, 1990. “Power Electronics”, Tata McGraw-Hill, New Delhi.
[13] Sudjadi, 2005. “ Teori dan Aplikasi
Mikrokontroller:Aplikasi pada mikrokontroller AT89c51” Graha Ilmu, Yogyakarta.
[14] Widodo Budiharto, 2004. “Interfacing Komputer dan Mikrokontroller”
PT.Elek Media Komputindo,Jakarta.
[15] Wong Mei
Chan, 2007. “MIMS, Annual Full
Prescribing Information”, Jakarta
Lampiran

Gambar
4.0 Rangkaian Keseluruhan
mas codding mau bertanya dong
BalasHapusuntuk minsis di ic atmega 89s51nya memakai codding apa? assambler atau bahasa SI
tolong pencerahnya ya, terimakasih :)